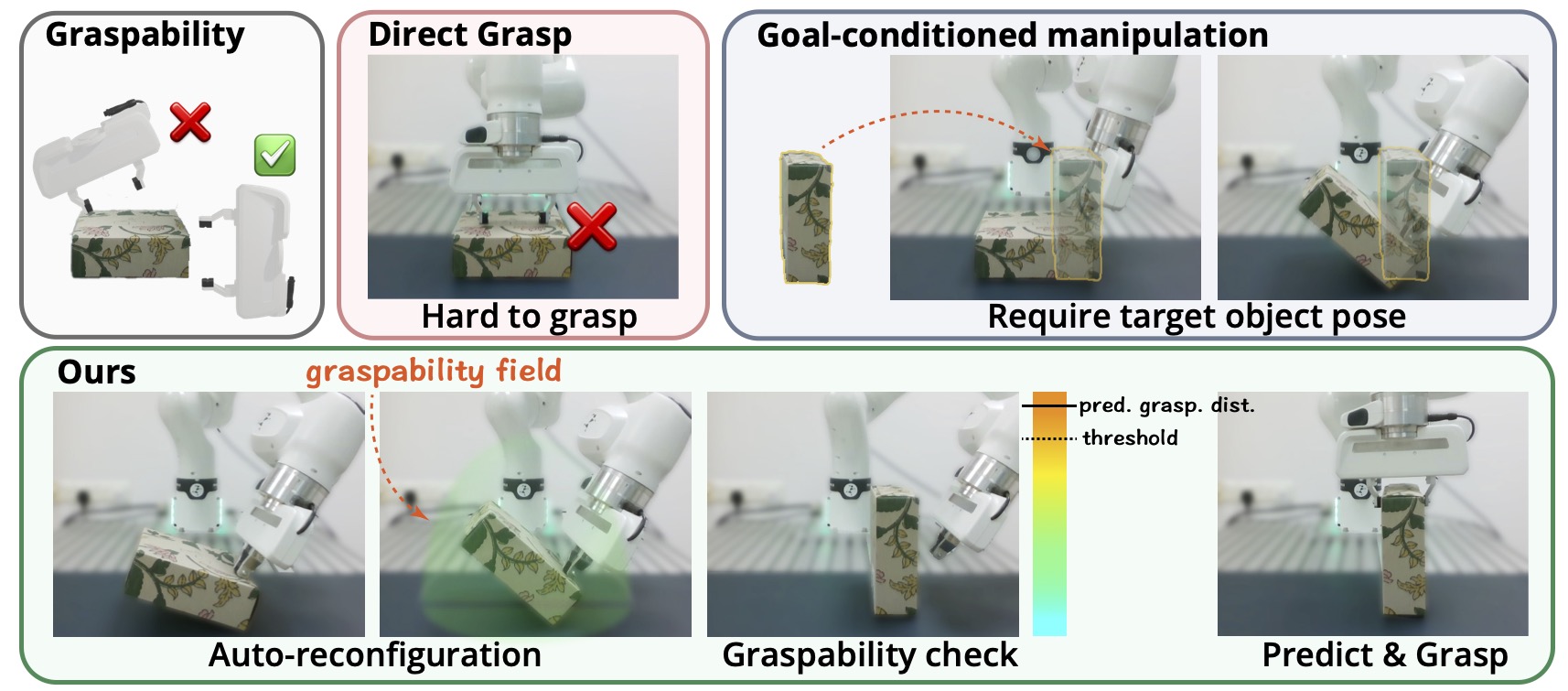
Direct grasps from a fixed approach can fail due to unfavorable object configurations, even when feasible grasps exist. Instead of requiring a predefined target pose, we learn a graspability field over object states to guide manipulation and trigger the manipulation-to-grasp transition. Once the object enters a graspable region, the robot autonomously transitions from manipulation to grasp execution.
Abstract
Non-prehensile manipulation is often used as a preparatory step for robotic grasping, yet existing approaches typically require a predefined target object pose. In practice, however, objects admit multiple graspable configurations and the desired pose is not known in advance. We reformulate non-prehensile manipulation for grasping as optimizing an object centric graspability objective rather than reaching a specific pose. We construct a graspable set from synthesized grasps and define a graspability field that measures how suitable an object configuration is for successful grasp execution. The scalar measure provides a dense learning signal for reinforcement learning and determines when to terminate manipulation. This yields a closed-loop manipulation-to-grasp pipeline driven by a single policy. Experiments in simulation and on a real robot show that the policy reliably reconfigures objects into graspable states and transitions to grasping without external planners or manually specified stopping conditions. The predicted graspability distance correlates with real world grasp success, which indicates that the learned representation captures grasp feasibility of object configurations.
Pipeline
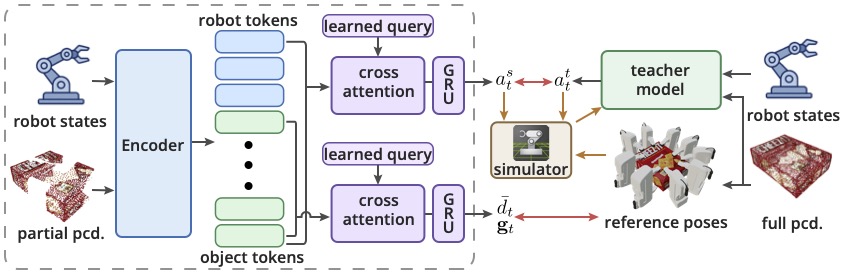
Method achitecture. A teacher–student framework that encodes observations, aggregates temporal information with a recurrent module, and predicts manipulation actions and a graspability distance. The teacher is used only during training, and the robot executes a grasp once the predicted graspability indicates a feasible configuration.
BibTeX
@inproceedings{zhong2026gomp,
title = {Grasp-Oriented Non-Prehensile Manipulation via Learning a Graspability Field},
author = {Zhong, Licheng and Lee, Gim Hee},
booktitle = {European Conference on Computer Vision (ECCV)},
year = {2026}
}